机器人视觉系统:基于机器视觉的指针式仪表图像采集系统研究
机器人视觉系统:基于机器视觉的指针式仪表图像采集系统研究
在人类的科学探索与生产实践活动中,仪器仪表是认识世界的重要工具。作为现代社会中“信息获得”的源头,仪器仪表工业代表着一个国家科技发展的水平。指针式仪表可以直观地反映出被测量值的变化趋势,而且还具有结构简单,安装维护方便,具有防尘、防水、防寒、不受电磁场干扰、可靠性高、价格便宜等优点,目前还在电力系统、铁路系统、厂矿企业、计量部门等大量使用。然而采取人工方式工作费时间、劳动强度大、检定效率低、检定误差大、可靠性差。针对人工方式检定的缺点,才用机器视觉来对仪表进行读数必成为未来的主流。
系统整体结构
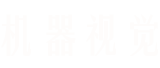
基于机器视觉的指针式仪表图像采集系统如图1所示,各部分工作关系如下:
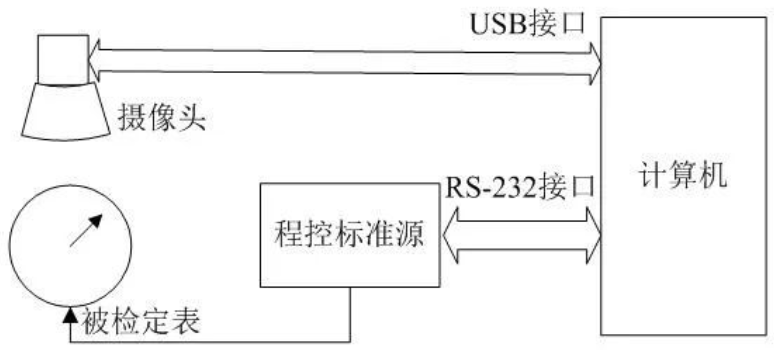
图1 指针式仪表图像采集系统的组成
程控电流源硬件电路设计
程控电流源硬件电路如图2所示,在此设计了MCU的外围电路(图3)和接口转换电路(图4)。
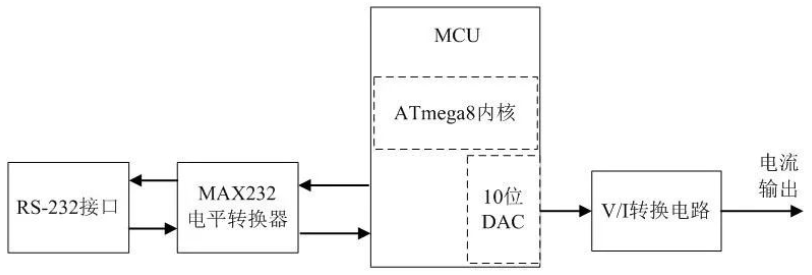
图2 程控电流源结构框图
图3 MCU的外围电路
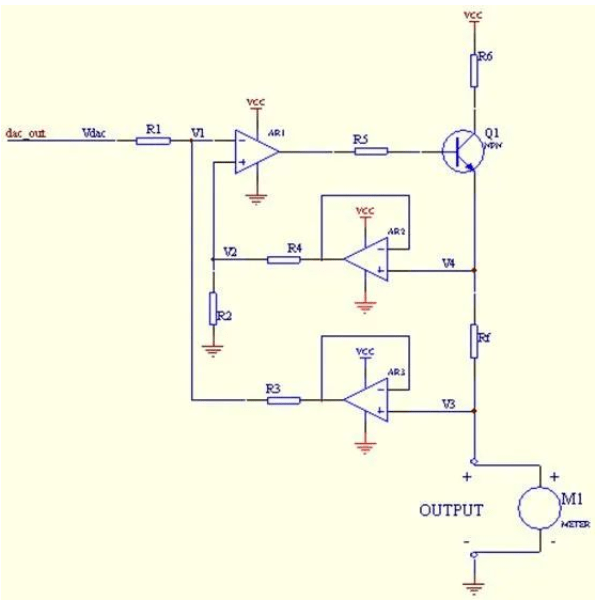
图4 接口转换电路
程控电流源软件设计
程控电流源软件流程如图5所示。
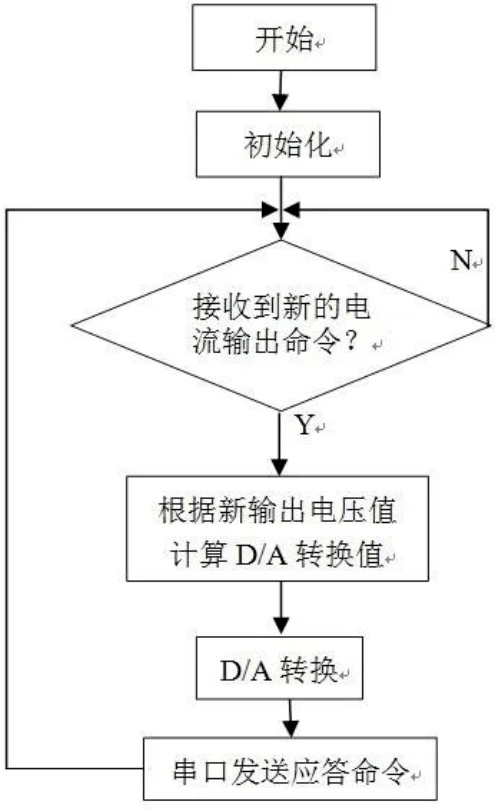
图5 程控电流源软件流程图
它接收来自上位机的命令,并根据上位机命令来调整输出电流的大小。串行口接收方式为中断接收。在串行口正确接收到来自上位机的新命令帧后,分析命令帧得到该次命令的输出电流设定值,设置D/A转换值使DAC输出更新,程控电流源的输出电流也得到了更新。最后应该给上位机发送应答命令,表示已对上位机的命令执行完毕,可以执行下一次的命令。
基于Matlab的图像处理程序设计
采集到图像之后,我们要对图像进行处理。本课题采用Matlab软件来进行。Matlab可以获取图像以便进行处理,在Matlab软件含有图像处理工具箱,能进行图像预处理与调试。
图像的增强
图像增强的目的在于改善图像的视觉效果,突出图像的某项特征,比如提高对比度、增加亮度等,来改善一幅图像的视觉效果。针对给定图像的应用场合,有目的地强调图像的整体或局部特性,扩大图像中不同物体特征之间的差别,满足某些特殊分析的需要。其方法是通过一定手段对原图像附加一些信息或变换数据,有选择地突出图像中感兴趣的特征或者抑制(掩盖)图像中某些不需要的特征,使图像与视觉响应特性相匹配。
针对指针仪表的特征,采用灰度拉伸对采集得到图像的进行对比度增强。经实验得到的效果图如图6所示。
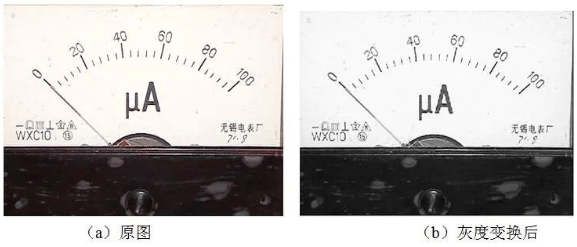
图6 灰度变换效果对比图
图像的滤波去噪
实际获得的图像在形成、传输、接收和处理的过程中,不可避免地存在着外部干扰和内部干扰,如光照强度不均匀形成的亮斑或者阴影、光电转换过程中敏感元件灵敏度的不均匀性、数字化过程的量化噪声、传输过程中的误差及人为因素等,均会存在一定程度的噪声干扰。噪声恶化了图像质量,使图像模糊、特征淹没,给分析带来一定的困难。因此,去除噪声、恢复原始图像是图像预处理过程中的一个重要内容。消除图像噪声的工作称之为图像平滑或滤波。图像平滑的目的有两个:改善图像质量和抽出对象特征。滤波实际上是一个对超空泡图像进行平滑的过程,即使图像没有被外界干扰,也需要去除图像中不需要的细节,突出图像的主要特征。
由于中值滤波能够较好地清除脉冲噪声,使得滤波后的图像均匀,且能极好地保持边界信息,所以本设计采用中值滤波这个方法。图7为经过图像中值滤波后的图像。
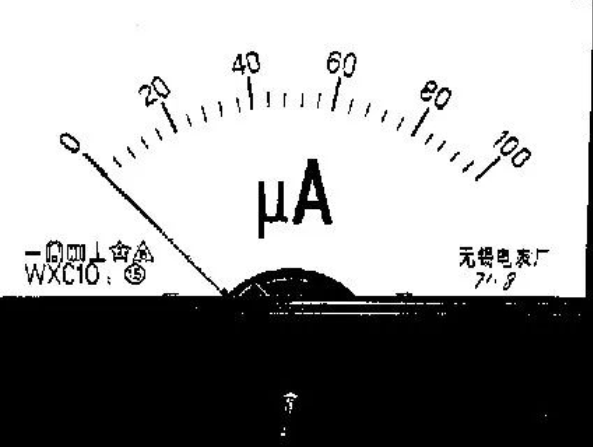
图7 图像中值滤波后
图像的二值化
图像二值化即设定某一阈值(Threshold),利用阈值将灰度图像的数据分成两部分:大于阈值的像素群和小于阈值的像素群。动态阈值二值化是指多阈值动态二值化算法,兼顾了图像总体灰度水平和像素领域的特征,能够适应灰度变化范围比较大的图像,不仅适合于小面积,同样也适合于大面积的扫描文本图像的二值化,对于处理图像的实用性更加广泛,实验结果也可以看到仪表指针、刻度信息都连同完好,图像清晰可见。图8为图像二值化后的图像。
图8 图像二值化后
结论
本文研究一个应用于指针表的图像采集系统,包括图像的采集和图像的预处理,并且设计出仿真采集指针表图像的实验系统,通过实验和分析处理,得到最佳的图像预处理效果。
文章来源《智能机器人》选辑,作者:重庆电信职业学院 曾小玲